सहारा रेगिस्तान की एक छिपकली ने मंगल ग्रह पर रोवर की गतिशीलता के लिए एक नए दृष्टिकोण को प्रेरित किया है । यह शोध ऐसे सक्षम खोजकर्ताओं को विकसित करने में सहायक हो सकता है जो रेतीले भूभागों में अधिक आसानी से यात्रा कर सकें।
मंगल ग्रह पर जाने वाले रोवरों के लिए सबसे बड़ी चुनौतियों में से एक है उनकी गति बनाए रखना। महीन, ढीली रेत के कारण पहिए फिसल सकते हैं, धंस सकते हैं या फंस सकते हैं—यह एक ऐसी समस्या है जिसने वर्षों से कई ग्रहीय अभियानों को बाधित किया है। अब, वुर्ज़बर्ग विश्वविद्यालय के शोधकर्ताओं ने इस समस्या के समाधान के लिए एक अप्रत्याशित स्रोत की ओर रुख किया है: सहारा रेगिस्तान की एक छोटी छिपकली जो रेत के नीचे बड़ी आसानी से "तैर" सकती है।
सैंडफिश ( स्किनकस स्किंकस ) के नाम से जाना जाने वाला यह सरीसृप पानी की सतह के नीचे गोता लगाता है और शिकारियों से बचने और शिकार करने के लिए ढीली रेत में खुद को आगे बढ़ाता है। वैज्ञानिकों ने हाल ही में इस असामान्य गति के पीछे की कार्यप्रणाली को समझा है। इन जानकारियों का उपयोग करते हुए, वुर्ज़बर्ग टीम ने जैविक रूप से प्रेरित पहियों वाला एक प्रायोगिक मंगल रोवर विकसित किया है जो रेतीले इलाकों में पारंपरिक डिज़ाइनों से बेहतर प्रदर्शन करता है।
यह परियोजना कंप्यूटर वैज्ञानिक मार्को श्मिट के नेतृत्व में है, जो पृथ्वी अवलोकन के लिए एम्बेडेड सिस्टम और सेंसर (ESSEO) के प्रोफेसर हैं, और जर्मन एयरोस्पेस सेंटर की VaMEx पहल के हिस्से के रूप में ब्रेमेन के शोधकर्ताओं के सहयोग से चलाई जा रही है।
मंगल ग्रह पर जाने वाले रोवरों को रेत, ढीली चट्टानों, ढलानों और ऊबड़-खाबड़ इलाकों में स्थिर और ऊर्जा कुशल रहते हुए गतिशील रहना होगा। प्रोफेसर श्मिट के साथ काम कर रहे शोधकर्ता अमेनोसिस लोपेज़ कहते हैं, "पारंपरिक पहिए अक्सर कम गति पर चलने के लिए अनुकूलित होते हैं और नरम जमीन पर फिसलने, धंसने या फंसने की प्रवृत्ति रखते हैं।"
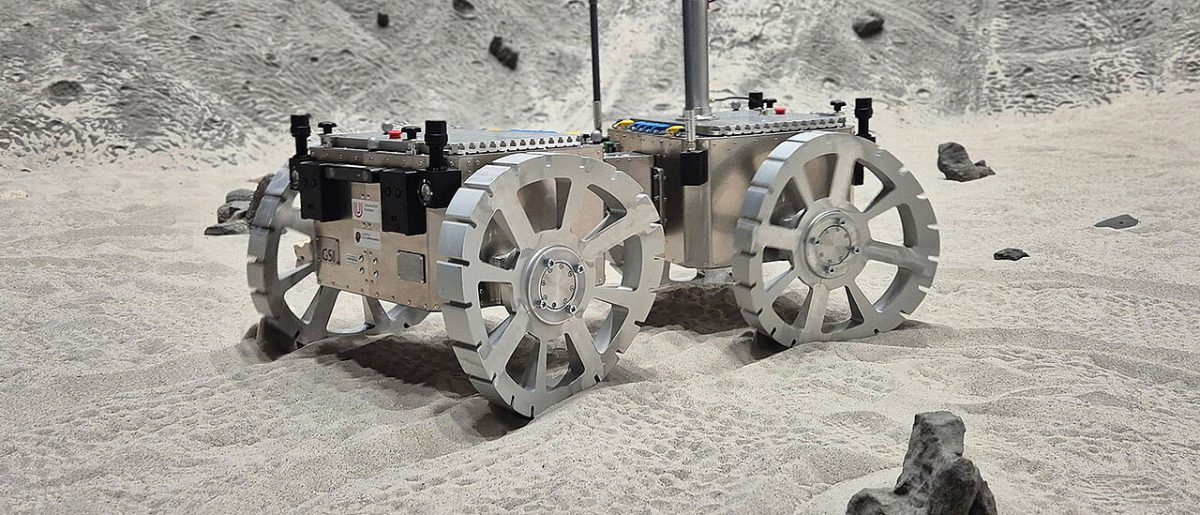
इस समस्या का समाधान करने के लिए, वुर्ज़बर्ग के नेतृत्व वाली टीम ने सैंडफिश छिपकली से प्रेरित होकर रोवर के नए पहिए डिज़ाइन किए। ये पहिए ढीली सतह पर लुढ़कने के बजाय, रेत में तैरने जैसी गति से चलते हैं: “ये पहिए ज़मीन के साथ जानवर की विशिष्ट अंतःक्रिया की नकल करते हैं, जिससे अनुदैर्ध्य और पार्श्व दोनों बल उत्पन्न होते हैं। रोवर रेत में वृत्ताकार निशान छोड़ता है – इससे पुष्टि होती है कि इच्छित तैराकी तंत्र प्राप्त कर लिया गया है।”
श्मिट के समूह ने ब्रेमेन स्थित जर्मन आर्टिफिशियल इंटेलिजेंस रिसर्च सेंटर (डीएफकेआई) और ब्रेमेन विश्वविद्यालय के सहयोगियों के साथ मिलकर रेत और खुले मैदान में रोवर का मूल्यांकन किया। परीक्षणों से पता चला कि वाहन रेतीले इलाके में स्थिर रूप से चल सकता है।
वुर्ज़बर्ग के प्रोफेसर कहते हैं, "प्रयोगों से हमें सुधार के लिए स्पष्ट संकेत भी मिले।" पहले सैंडफिश के पहिये, इसी तरह के वायवीय पहियों की तुलना में भारी और संकरे थे। इस संयोजन से ज़मीन पर दबाव बढ़ गया, जिससे रोवर धंसने लगा। फिसलने और धंसने की प्रक्रिया एक-दूसरे को और मज़बूत करती गई, जिससे रोवर को नियंत्रित करना और मुश्किल हो गया।
टीम ने पहियों को चौड़ा करके और उनका वजन कम करके डिज़ाइन में सुधार किया। इन बदलावों से ज़मीन पर दबाव कम हुआ, फिसलन कम हुई और स्थिरता व नियंत्रण दोनों में सुधार हुआ। शोधकर्ताओं का अनुमान है कि "पहियों की सतह में और सुधार करने से मिश्रित भूभाग पर प्रदर्शन में और भी बेहतरी आने की संभावना है।"
ESSEO टीम की योजना यांत्रिक डिजाइन से आगे बढ़कर सॉफ्टवेयर-निर्देशित गतिशीलता में अपने VaMEx कार्य का विस्तार करने की भी है।
इसका उद्देश्य ऐसी नियंत्रण रणनीतियाँ विकसित करना है जो फिसलने, धंसने और पहियों के ढीली सतह के साथ परस्पर क्रिया करने के तरीके को सीधे तौर पर ध्यान में रखें। ऐसा सॉफ़्टवेयर रोवर को रेत और अन्य दानेदार वातावरण में अधिक विश्वसनीय और अनुकूल रूप से चलने में मदद कर सकता है।

.jpg)
.jpg)
.jpg)
.jpg)
.jpg)


hindnesri24news@gmail.com
© Hind Kesari24. All Rights Reserved.